 ngôn ngữ
ngôn ngữ
ngôn ngữ
ngôn ngữ
Công nghệ trục cân bằng là một công nghệ động cơ có cấu trúc đơn giản và rất hữu ích, nó có thể làm giảm độ rung của xe một cách hiệu quả và cải thiện sự thoải mái khi lái xe. Một số người tiêu dùng có thể hỏi, tại sao lại thiết kế cấu trúc này trong một số động cơ? Để hiểu rõ vấn đề này, trước tiên chúng ta cần làm rõ một điều - "nguyên lý dao động của động cơ".
Khi động cơ ở trạng thái làm việc, tốc độ chuyển động của pít-tông rất nhanh và tốc độ rất không đều. Khi pít-tông nằm ở vị trí điểm chết trên và điểm chết dưới thì tốc độ của nó bằng 0 nhưng tốc độ ở vị trí giữa điểm chết trên và điểm chết dưới đạt cao nhất. Bởi vì pít-tông thực hiện các chuyển động tuyến tính tốc độ cao lặp đi lặp lại trong xi-lanh, lực quán tính lớn phải xuất hiện trên pít-tông, chốt pít-tông và thanh nối. Mặc dù đối trọng trên thanh kết nối có thể cân bằng hiệu quả các lực quán tính này, miễn là một phần của khối lượng chuyển động tham gia vào chuyển động tuyến tính, phần còn lại tham gia vào chuyển động quay. Do đó, ngoại trừ vị trí điểm chết trên và dưới, các lực quán tính khác hoàn toàn không thể đạt đến trạng thái cân bằng và động cơ dao động tại thời điểm này.
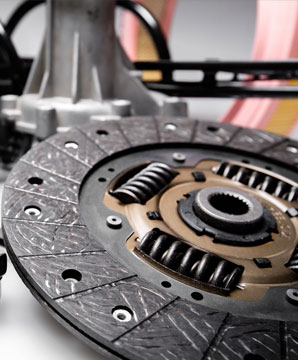
Để loại bỏ dao động này, các nhà hoạch định đã chọn nhiều phương pháp, chẳng hạn như chọn pít-tông nhẹ để giảm khối lượng của các bộ phận chuyển động, cải thiện độ cứng của trục khuỷu và chọn động cơ hình chữ "V" với góc 60 độ. Thêm một trục cân bằng (bộ phận được hiển thị ở vị trí chính giữa trong hình trên) cũng là một trong những phương pháp này. Nói tóm lại, trục cân bằng thực chất là một trục được trang bị trọng lượng lệch tâm và quay đồng bộ với trục khuỷu, sử dụng lực dao động ngược do trọng lượng lệch tâm tạo ra, để động cơ đạt được hiệu quả cân bằng tốt và giảm dao động của động cơ.
Trục cân bằng có thể được chia thành hai loại: trục cân bằng đơn và trục cân bằng kép. Trục cân bằng đơn Wang Wenshengyi chọn trục cân bằng đơn và sử dụng phương pháp truyền bánh răng để hoạt động. Bánh răng dẫn động trục cân bằng cố định, bánh răng dẫn động trục cân bằng và trục cân bằng được dẫn động bằng chuyển động quay của trục khuỷu. Trục cân bằng đơn có thể cân bằng dao động bậc nhất chiếm một phần đáng kể trong toàn bộ dao động, do đó dao động của động cơ được cải thiện đáng kể. Vì trục cân bằng đơn có cấu trúc đơn giản và chiếm ít không gian hơn nên nó được sử dụng rộng rãi trong các động cơ một xi-lanh và động cơ dung tích nhỏ. Trục cân bằng kép sử dụng phương pháp truyền động xích để truyền chuyển động quay của hai trục cân bằng, trong đó một trục cân bằng và tốc độ động cơ là như nhau, có thể loại bỏ dao động bậc nhất của động cơ; tốc độ trục cân bằng khác gấp đôi tốc độ động cơ, Có thể loại bỏ dao động bậc hai của động cơ, sau đó đạt được hiệu ứng giảm chấn lý tưởng hơn nữa. Do cấu trúc của trục cân bằng kép tương đối lộn xộn, giá thành cao và không gian chiếm dụng của động cơ tương đối lớn nên nó thường được sử dụng trên các loại xe có phân khối lớn. Ngoài ra, còn có phương pháp lắp đặt trục cân bằng kép, tức là hai trục cân bằng được bố trí đối xứng với đường tâm của xi lanh, hướng quay ngược lại và tốc độ quay giống với tốc độ quay của trục khuỷu để cân bằng lực quán tính chuyển động tịnh tiến cấp một của động cơ.







